2020. Április 15-én egy rövid időre megdermedtem az email fiókomat pásztázva, mikor is megláttam hogy a DJI bizony valamit leleplezni készül. Ezt szűk két hét izgatott várakozást követte, mire is megtudtuk, hogy a tech cég új drónja az Air szériát fogja majd erősíteni, a DJI Mavic Air 2 gépével.

Kissé csalódott is voltam, meg nem is. Őszinte leszek azért reménykedtem benne, hogy valami izgalmasabb, korszakalkotóbb formát és összességében valami frissebbet kapunk, de „csak” a polgári szférában elérhető, toronymagasan a legjobb ár / érték arányú drónt kaptuk meg, amit valaha látott a világ.
Viccet félretéve ilyeneken időm se volt gondolkodni, hiszen már a bejelentés előtt kiszivárgott (manapság mindent kiszivárogtatnak, ami nekem egy kifejezetten ellenszenves dolog) hogy 48 megapixeles kamerát fog kapni a DJI gépek új képviselője.
Aki ismeri munkásságom az tudja hogy ennek mekkora jelentősége van számomra. Aki nem ismeri, annak pedig őszintén ajánlom hogy olvasson tovább, mert csoda dolgokat fog látni.
Miről fogunk beszélni ebben a cikkben?
- A DJI Mavic Air 2-ről általánosságban (repülési idő, hatótáv, videóminőség, funkciók…)
- A Mavic 2 Air ára
- Első repülés tapasztalatai
- Fotogrammetriai tesztek és eredményeik
A DJI Mavic Air 2-ről általánosságban
Mire ez a blogbejegyzés megjelenik addigra már több mint valószínű, hogy aki érdekelt a témában már minden számára releváns információt meg tudott szerezni magának a DJI Mavic Air 2-ről, hiszen a kompetens Youtube-erek, bloggerek már több mint egy hete publikálták tesztjeiket.

Ezzel nincs is gond, hiszen jómagam is ezen, többnyire videó tesztek alapján hoztam meg a vásárlási döntésem… Na persze, mintha nem rendeltem volna elő abban a pillanatban, hogy megjelent a vásárlás gomb a DJI ARS oldalán.
Ennek apropóján ebben a cikkben nem az általános képességeit taglalom részletesen a drónnak, de a teljesség kedvéért röviden ezekről is írok mielőtt bele vágnánk a fotogrammetriai tesztekbe.
Az Air 2 főbb jellemzői
- 48 megapixel felbontású kamera (8000×6000 pixel felbontás)
- Nagyjából 30 perces repülési idő (Az életben nem merül le…)
- 4K 60FPS videófelvétel (+Full HD 240FPS, 8K Hyperlapse, és még sok más)
- Az előző modellekhez képest fejlettebb célpont követő funkció (+ehhez kapcsolódó rengeteg automata funkció)
- Kb. 3 kilométeres hatótáv, melyet Nem Wifi csatorna biztosít (Hosszabb hatótáv és nagyobb biztonság a belvárosi Wifi tengerben)
Ezek alapján a DJI Mavic Air 2 több mint alkalmas professzionális fotós és videós munkákra. Apró mérete és súlya pontosan egy olyan mezsgyén mozog, hogy a szél már nem viszi el, feltűnést sem igazán kelt (ez a belvárosi munkák esetén jön kifejezetten jól)

Jelenleg úgy írom a cikket, hogy nem repültem még a géppel. A táskájában pihen startra készen, és kb. 2 óra múlva már a levegőben lesz. Nem szeretnék egy kedves olvasót sem untatni a száraz adatokból való következtetésekkel, így mielőtt rátérünk a tényleges tesztekre, még beszéljünk pár szót a gép áráról.
A DJI Mavic Air 2 ára
Mi a DJR ARS – től szereztük be a saját példányunkat így az Ő áraikat fogom referenciaként felsorolni. Ajánlom a DJI ARS-t hiszen ők a hivatalos magyar DJI retail store, és nem csalódtam még bolt egyetlen szolgáltatásában sem.
- DJI Mavic Air 2 – 299.900 Ft
- DJI Mavic Air 2, Fly More Combo – 379.900 Ft
- DJI Care biztosítás a gépre – 31.900 Ft
Beszéljünk picit ezekről az árakról.
Először is, nem győzöm hangsúlyozni, hogy mennyire fontos a DJI Care vásárlása, főleg egy ilyen értékű drónhoz. Aki nem ismeri a DJI Care-t annak dióhéjban:
A DJI Care garanciával rendelkezők számára, bármi, akár pilóta hibájából történő káreset történik a drónnal, azonnal javítják vagy cserélik. Ennek feltétlei:
- Meg kell lennie, az akár ripityára tört drónnak! Tehát ha elviszi a Duna, akkor sajnos nem működik a dolog.
- Nem végtelen alkalommal működik a DJI Care, hanem összesen 2 alkalommal cserélik az összetört drónt.
- Amellett hogy valaki kiváltotta a DJI Care-t minden csere alkalmával, mégegyszer ki kell fizetni kb. egy a gépre vonatkozó DJI Care összeget. Ettől ne ijedjen meg senki, mert a matek még 2 csere esetén is a mi oldalunkon áll határozottan: 31.900 Ft az alap DJI Care + 31.900Ft az első csere = 63.800 Ft Nos könnyen láthatjuk, hogy ez jóval kevesebb, mintha egy új gépet kellene vennünk.
A gép ára pedig elképesztően alacsony. Természetesen sok pénzről beszélünk, de ár / érték arányban a DJI Mavic Air 2 verhetetlen. Néhány héttel ezelőtt, ezt a minőséget határozottan nagyobb, és jóval drágább gépektől kaphattuk csak meg. Ha valaki csak meg közelíteni akarta ezt a minőséget (Például egy Mavic 2 Pro-val) annak igencsak a zsebébe kellett nyúlnia, és minimum fél millió forintot letennie az asztalra. Most ehhez, és még jóval többhöz (magasabb felbontás, hosszabb repülési idő és hatótáv, extra funkciók, stb.) 300.000 Forintért hozzájuthat.
Az első repülés tapasztalatai
Az átvétel másnapján gyönyörű idő köszöntött ránk, így a kora délelőtti órákban egy alkalmas helyszínen a levegőbe is emeltem a gépet, és néhány perc leforgása alatt a következőket tapasztaltam:
- A Mavic Air 2 gyakorlatilag mozdulatlan a levegőben, pedig volt egy kis szellő is ami tologathatta volna. Annyira stabil, hogy kedve lenne az embernek egészen közel hajolni, hogy lássa, hogy egyáltalán mozdul 1-2 millimétert. Ilyet azért ne csináljuk…

- A gyors próbakör alatt hamar rájöttem, hogy ez nem egy Mavic Mini. Az új távirányító dizájn stabilitás és finomsága párosul a gép irányíthatóságának stabilitásával és finomságával. Azonnal reagál, Normál módban is roppant mozgékony és nagyon pontos az irányítás.

- Nem telt bele sok idő mire a kiindulási ponttól, kb. már 400 méterre jártam, úgy 80 méteres magasságon. A jelerősség maximumon, és a videó átvitel is hibátlan, szakadozásnak nyoma sincs.
- A gimbal, azaz a kamera kiegyenlítője természetesen nem okozott meglepetést. Nem csináltam semmi őrült trükköt a géppel, de nem tudtam úgy manőverezni, hogy a kép akár egy picit is bemozdult volna.
- És akkor elsütöttem az első 48 megapixeles képet. Az első gondolatom az volt hogy, hát igen, azért nem instant készíti el a gép ezeket a nagy felbontású képeket, bár erre számítottam is. Tehát a 48 megapixeles képek készítésekor, van egy 1-2 másodperces „várakozási idő”, de legalábbis annyi, hogy meg kell álljunk a levegőben fotózáskor. Kissé lustának is tűnhet ez a mód, de remélhetőleg gyorsítanak rajta majd a jövőben egy frissítéssel.
De most térjünk át a fotogrammetriai tesztekre, mert ott még fogok elmélkedni az ide tartozó funkciókról.
Fotogrammetriai tesztek
A fotogrammetriai tesztek célja
Arra vagyunk kíváncsiak, hogy 100 méteres magasságból, milyen minőségű fotogrammetriai termékeket tudunk előállítani a 48 megapixeles szenzor segítségével.
Ehhez egy kis magyarázat
A légifotogrammetriai felmérésekkel előállítunk egy ortofotót és egy pontfelhőt, melyekkel 3D térképeket tudunk rajzolni, azaz praktikusan tervezési alaptérképeket.
Ahhoz hogy jó minőségű térképet állítsunk elő, jó minőségű alapadatok szükségesek.
Az hogy milyen minőségű (és részletességű) lesz az ortofotónk, és a pontfelhőnk nagyban függ a kamera felbontásától (és az optika / érzékelő minőségétől is).
Ha egy nagyon egyszerű példán szeretnénk szemléltetni, akkor egy 48 megapixeles felbontású képen, négyszer annyi adat van mint egy 12 megapixeles képen, pusztán azért, mert 4 szer annyi pixel van a digitális képen.
Amikor a levegőből fotózunk, fontos a Térbeli felbontásra figyelnünk, azaz, hogy egy, a digitális képet alkotó pixel, mekkora területet fed le a valóságban. Például ha egy DJI Phantom 4 géppel 1000 méteres magasságból fotóznánk, akkor 1 pixel valós mérete kb. 25×25 centiméter lenne. Ez azt jelenti, hogy egy csatorna fedlapot sem igazán tudnánk megkülönböztetni a képen mert az 4 pixelből állna. Viszont ha 100 méterről fotózunk akkor egy pixel 2.5 centiméternek felel meg, így ezzel sokkal több vizuális adat lesz elérhető.
A nagy magasság előnye hogy kevesebb képet kell elkészítenünk, mert több területet látunk be a kamerával, viszont hátránya, hogy minél magasabban vagyunk annál kevesebb adatot nyerhetünk ki a képekből.
Ezt összefoglalva: Eddig nagyjából 40 méter volt a maximum repülési magasság amiből megfelelő minőségű adatot tudtunk előállítani. Ez most akár lehet 160 méter is, vagy 100 méterről majdnem dupla olyan jó minőség.
Mit jelent ez számunkra?
A DJI Mavic Air 2 48 megapixeles szenzorának, becsült térbeli felbontása 100 méteren 0.33 cm / pixel
Ha 100 méterről tudunk 40 méter helyett fotózni, legalább felére lecsökken a terepi munka időtartama.
Az eddigi adatminőségünk dupláját tudjuk szolgáltatni … azt hiszem ezt nem kell megmagyarázni.
De nézzük meg ezt gyakorlatban.
Első teszt
A feldolgozáshoz Agisoft Photoscan-t használtunk, mindent Medium beállításon és a feldolgozó hardver egy 9. generációs i7-es processzorral, 32 gb DDR4 memóriával és egy Nvidia Quadro RTX3000 videókártyával rendelkező notebook volt.
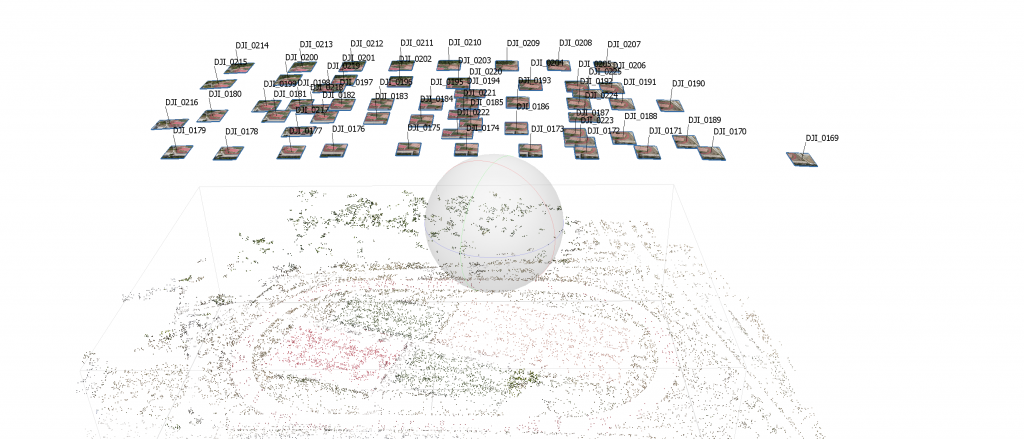
Az első felmérési területről (20.000 négyzetméter) 100m-es magasságban készítettük el a képeket, így 56 fotó készült a területről, nagyjából 70%-os átfedéssel.
A feldolgozási idő a következőképp alakult:
- Tájékozás = 5 perc (56 fotó)
- Pontfelhő előállítás = 7 perc (20 millió pont)
- Felület előállítás = 7 perc (500.000 poligon)
- Textúra előállítás = 2 perc (16 megapixel)

- Ortofotó generálás = 2 perc (169 megapixeles ortomozaik)

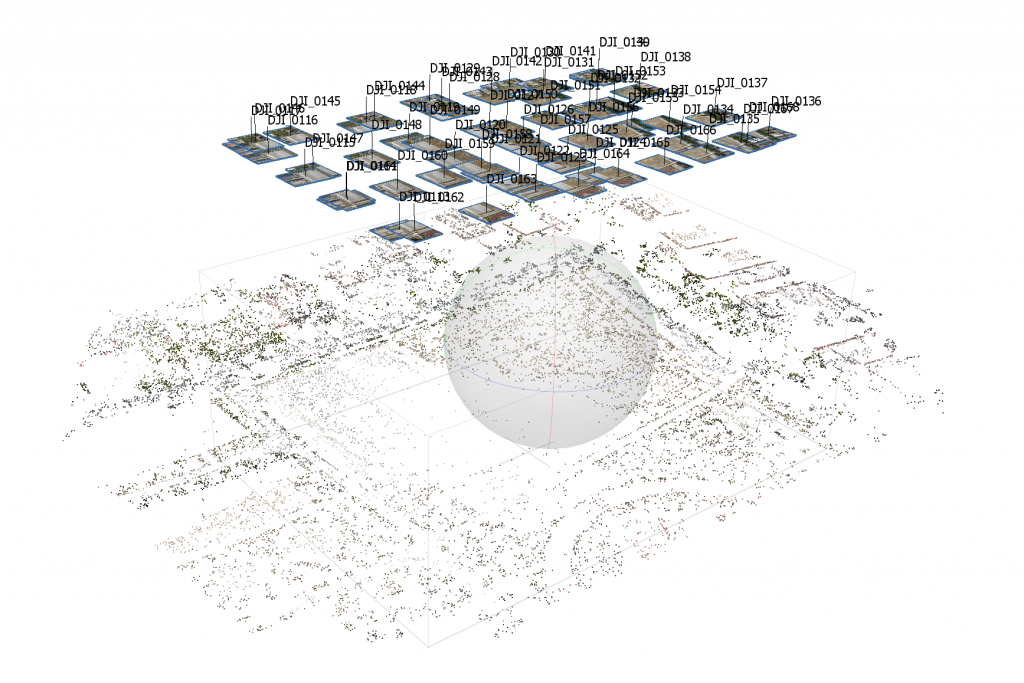
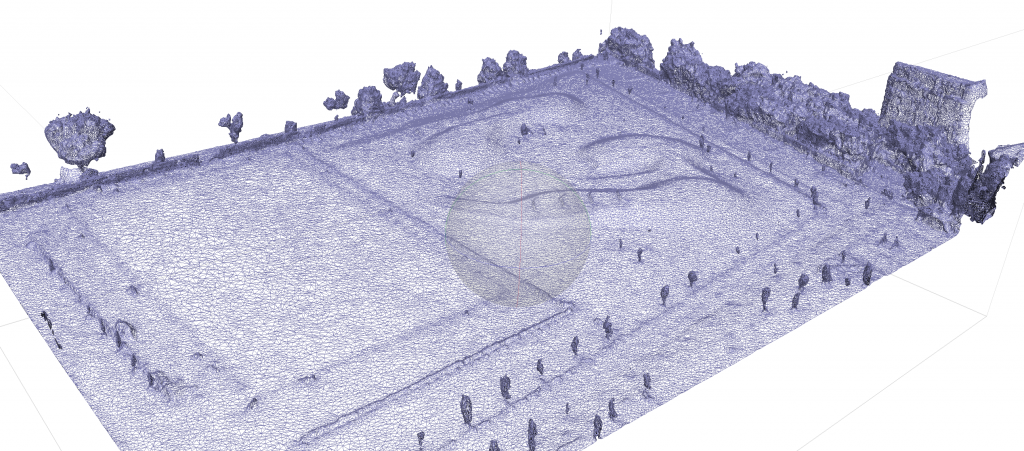
Eredmények
Először is nézzük meg a pontfelhő felbontását. A 20.000 négyzetméteres területről, 10 perc terepi munkával és 23 perc feldolgozási idővel, azaz nagyjából fél óra alatt sikerült előállítani egy 1 centiméter részletességű pontfelhőt, 100 méteres magasságból.
Ez az eredmény minden várakozásunkat felülmúlta. Ahhoz hogy ilyen részletességű pontfelhőt állítsunk elő egy területről, eddig maximum 30 méteren kellett repülnünk, ami legalább 300-400 képet igényelt volna 80%-os átfedéssel.
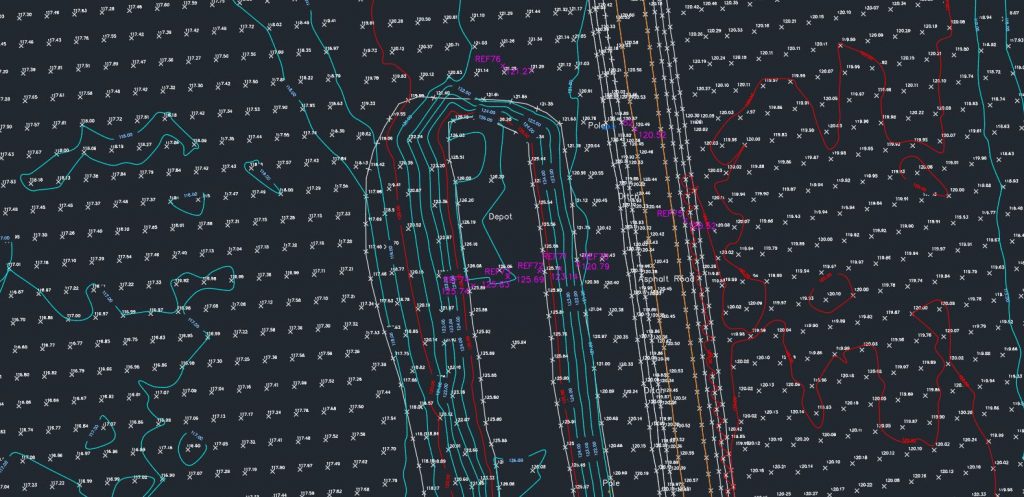
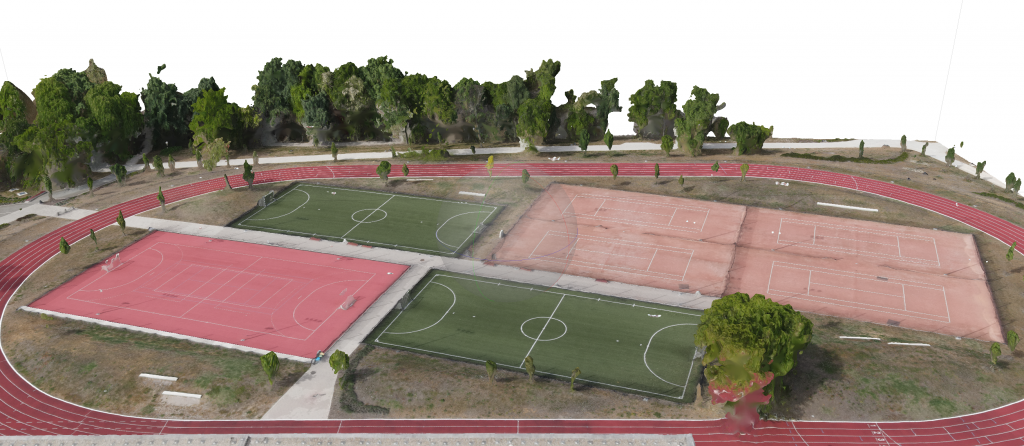
De mennyire részletes az ortofotó?
Íme néhány kinagyított részlet:




Szavakra lefordítva: Ez a részletesség azt jelenti, hogy egy kozmű fedlap, emelő lyukjai is kivehetők a képen, hangsúlyoznám úgy, hogy a képeket 100 méteres magasságból készítettük.
Emlékezzünk mi volt a célunk a teszttel.
„Arra vagyunk kíváncsiak, hogy 100 méteres magasságból, milyen minőségű fotogrammetriai termékeket tudunk előállítani a 48 megapixeles szenzor segítségével.”
A minőség szintén minden várakozásunkat felülmúlta, és mindezt elképesztően rövid terepi felmérési és feldolgozási idővel.
Bevallom őszintén, bár bíztam a teszt sikerességében, de azért kissé féltem hogy egy fotogrammetriai feldolgozó szoftver milyen minőségű adatokat fog előállítani egy fél inch-es szenzor 48 megapixeles képeiből. A Fél inch… nem valami nagy, és egy ilyen pici érzékelőn létrejövő óriási felbontás, bizony könnyen zajos kepékéket eredményezhet, de ennek szerencsére semmi nyoma.
De egy teszt nem teszt, nézzünk meg ugyanezt egy másik területen is.
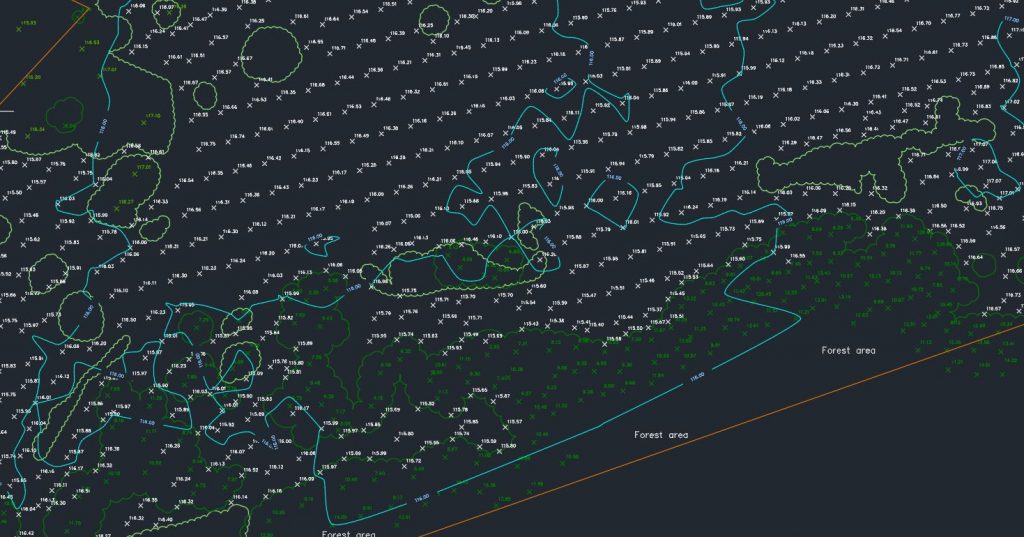
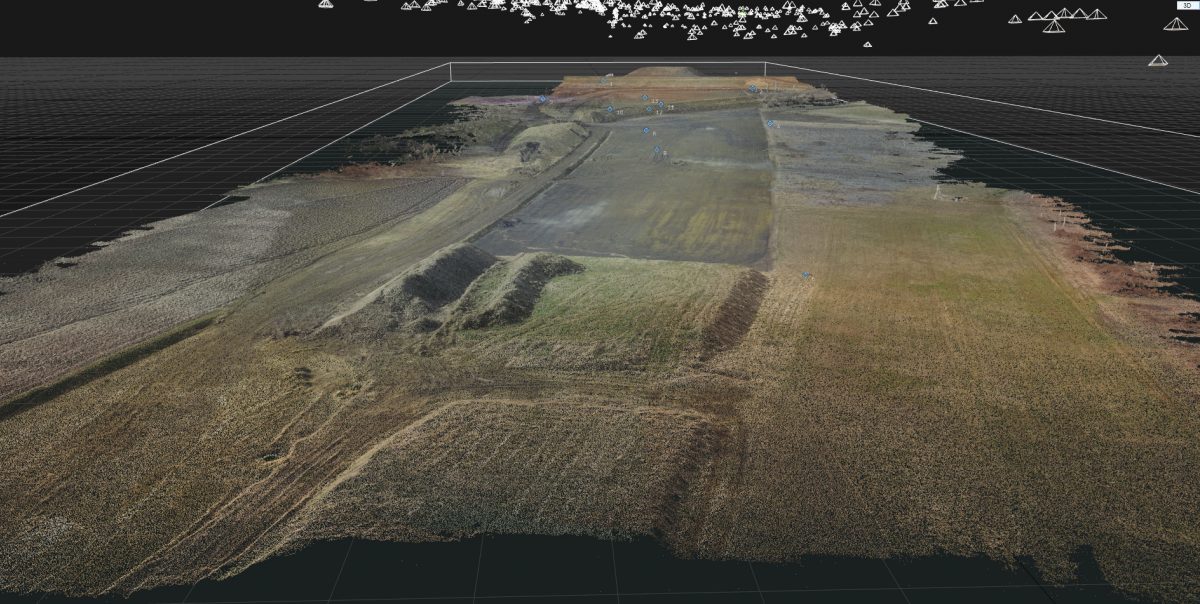
Második teszt
A második tesztet ugyan ezekkel a paraméterekkel végeztük, csak egy másik, hasonló méretű területen. Azért választottuk ezt a területet, mert a felületek színe változatosabb, viszont geometriája sokkal laposabb. Az ilyen területeken remekül kijön, ha a feldolgozó szoftver valamilyen hibát vét a kamera kalibrációs folyamatban, vagy nem tudja megfelelően kiküszöbölni az optika torzításait.
- Tájékozás = 5 perc (56 fotó)
- Pontfelhő előállítás = 18 perc (15 millió pont)

- Felület előállítás = 10 perc (1.400.000 poligon)
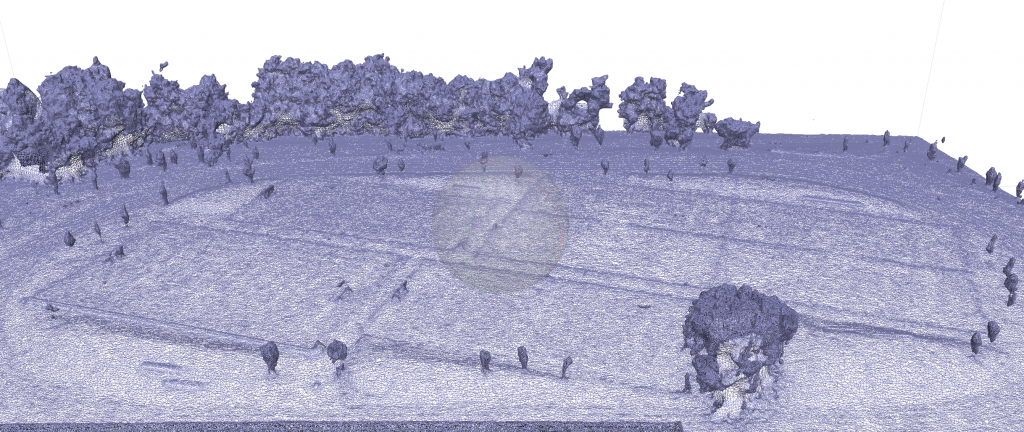
- Textúra előállítás = 6 perc (16 megapixel)
- Ortofotó generálás = 2 perc (140 megapixeles ortomozaik)

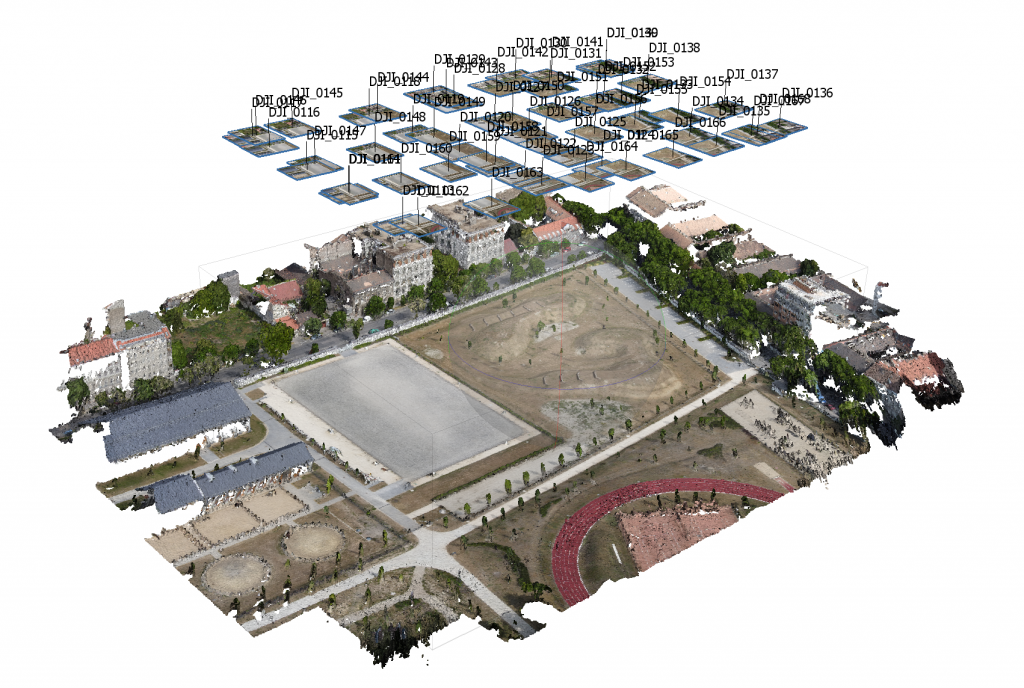
Eredmények



A második teszt eredményei csak tovább erősítettek minket abban a meggyőződésben, hogy a DJI Mavic Air 2 48 megapixeles kamerája, több mint alkalmas fotogrammetriai feladatok ellátásra.
Összegzés
Tehát tesztünk célja az volt hogy megvizsgáljuk, alkalmas e a DJI Mavic Air 2, 48 megapixeles szenzora fotogrammetriai munkákra, és valóban hozza e a felbontás azt a minőséget, melyet megelőlegeztünk neki, szimplán a papírforam alapján.
A válasz: Igen, határozottan Igen!
Mondanom sem kell, hogy hihetetlenül örülünk ezeknek az eredményeknek, mert ez a drón és szenzora, egy hatalmas előrelépést jelent nekünk abban hogy munkánkat a legjobb minőségben tudjuk elvégezni.
Akik ismernek minket és a munkásságunkat tudják, hogy fejlődésünk egyik fő mozgatórugója az ügyfeleink elégedettsége és pozitív visszajelzéseik. Büszkén jelenthetjük, hogy ismét tettünk egy lépést annak irányába, hogy a legkiválóbb szolgáltatást tudjuk nyújtani.
He érdekelnek a szolgáltatásaink, vedd fel velünk a kapcsolatot bátran bármikor: https://furaysolutions.com/terkepezes/